GET-3D-1.0 Grasp Executions
Click a thumbnail to switch videos. Videos shown at real execution speed.
The GET Gripper
In 2025, Michael Burgess and Edward H. Adelson introduced the Grasp EveryThing (GET) Gripper, an asymmetrical gripper with one wide "V-shaped" jaw opposing a narrow jaw. We present GET-2D-1.0 and GET-3D-1.0, grasp planners for the GET gripper which take advantage of the GET gripper's asymmetric geometry to plan robust grasps.

(a) Narrow jaws are susceptible to torque about the grasp axis. (b) Wide jaws cannot access small concavities. (c) The GET Gripper provides asymmetric geometry which addresses both limitations.
GET-2D-1.0
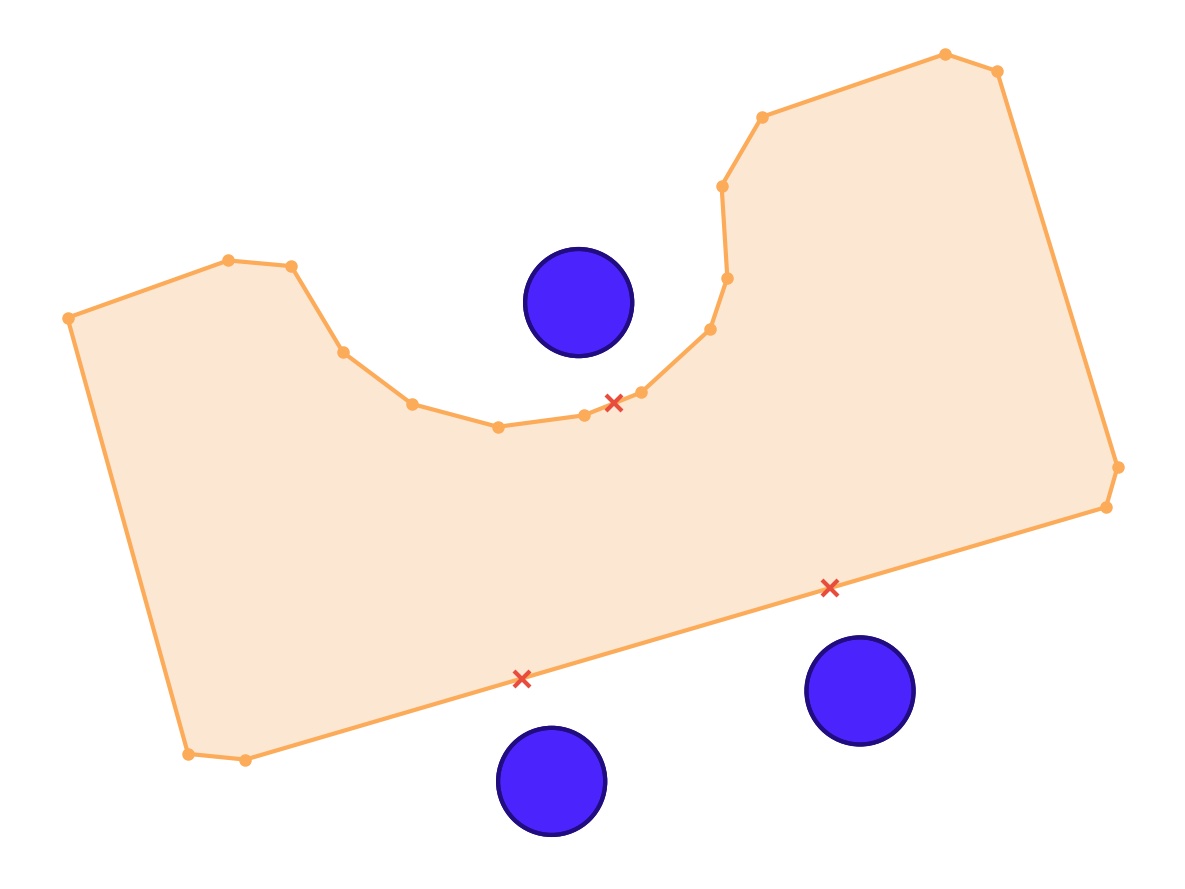
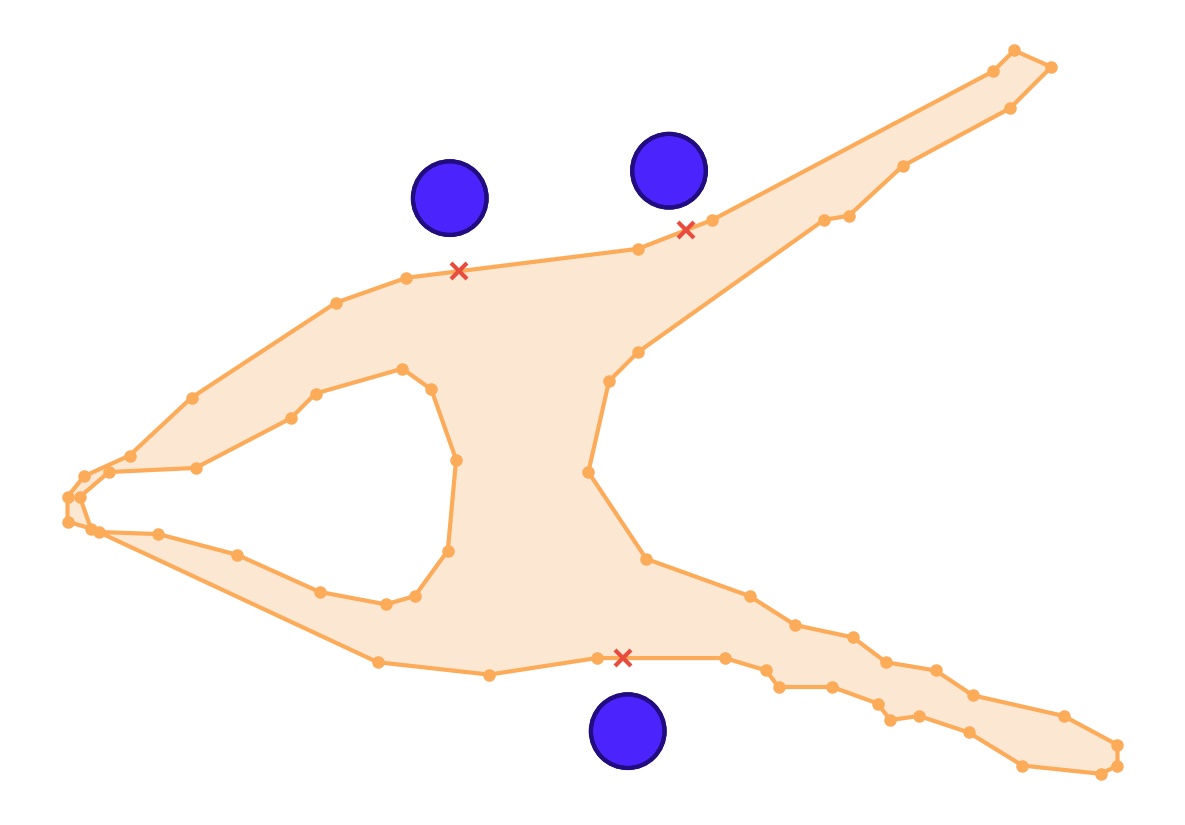
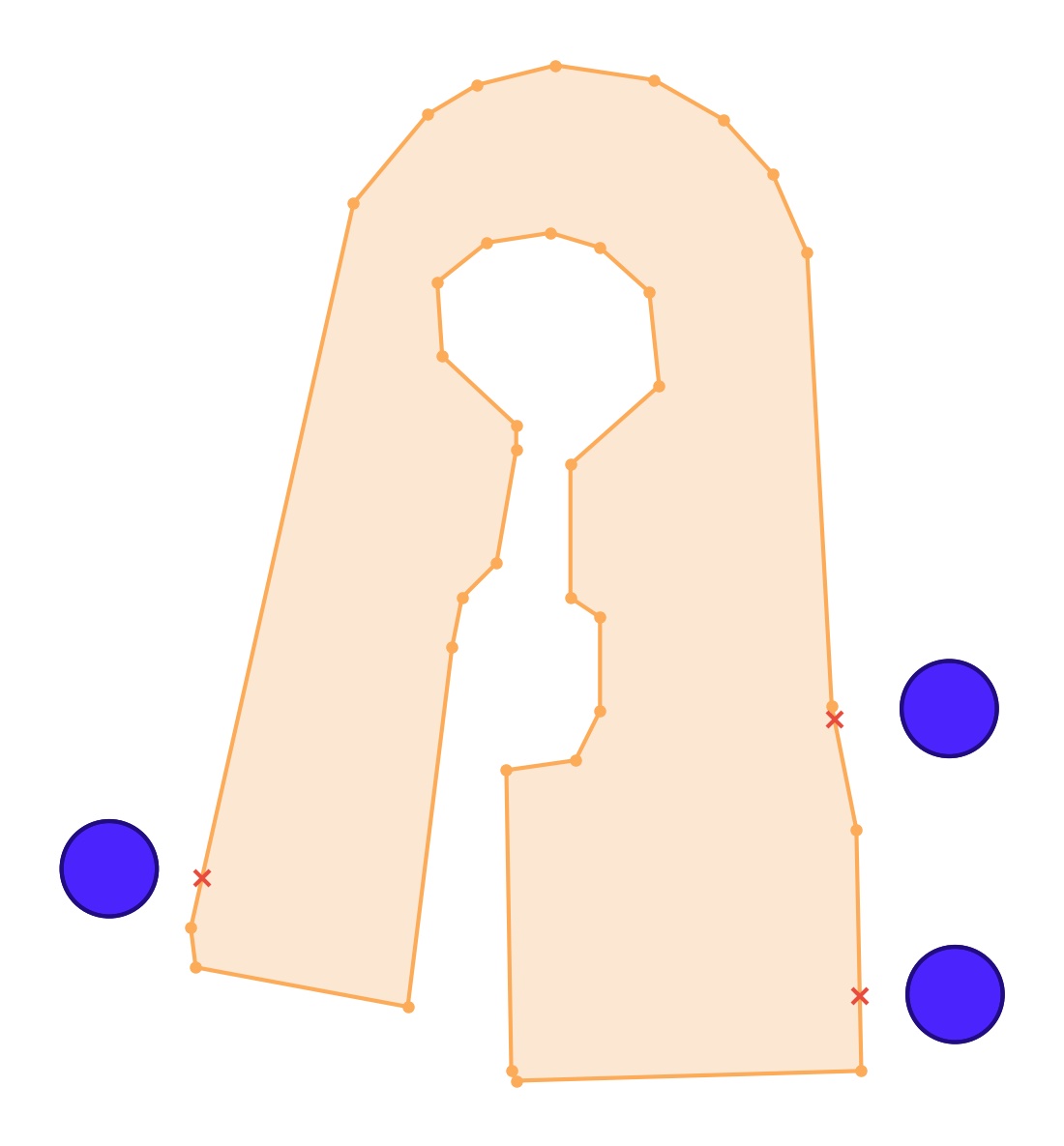
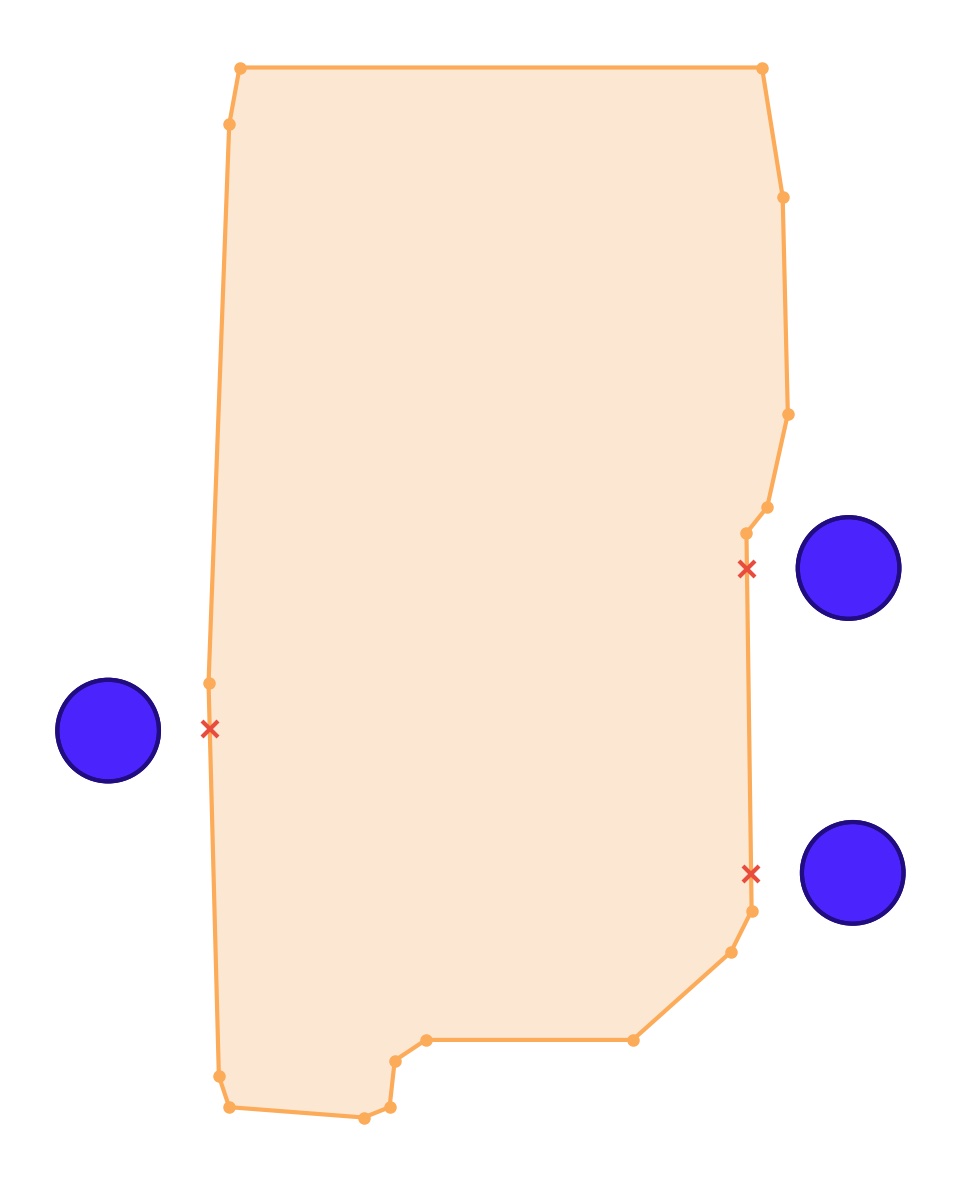
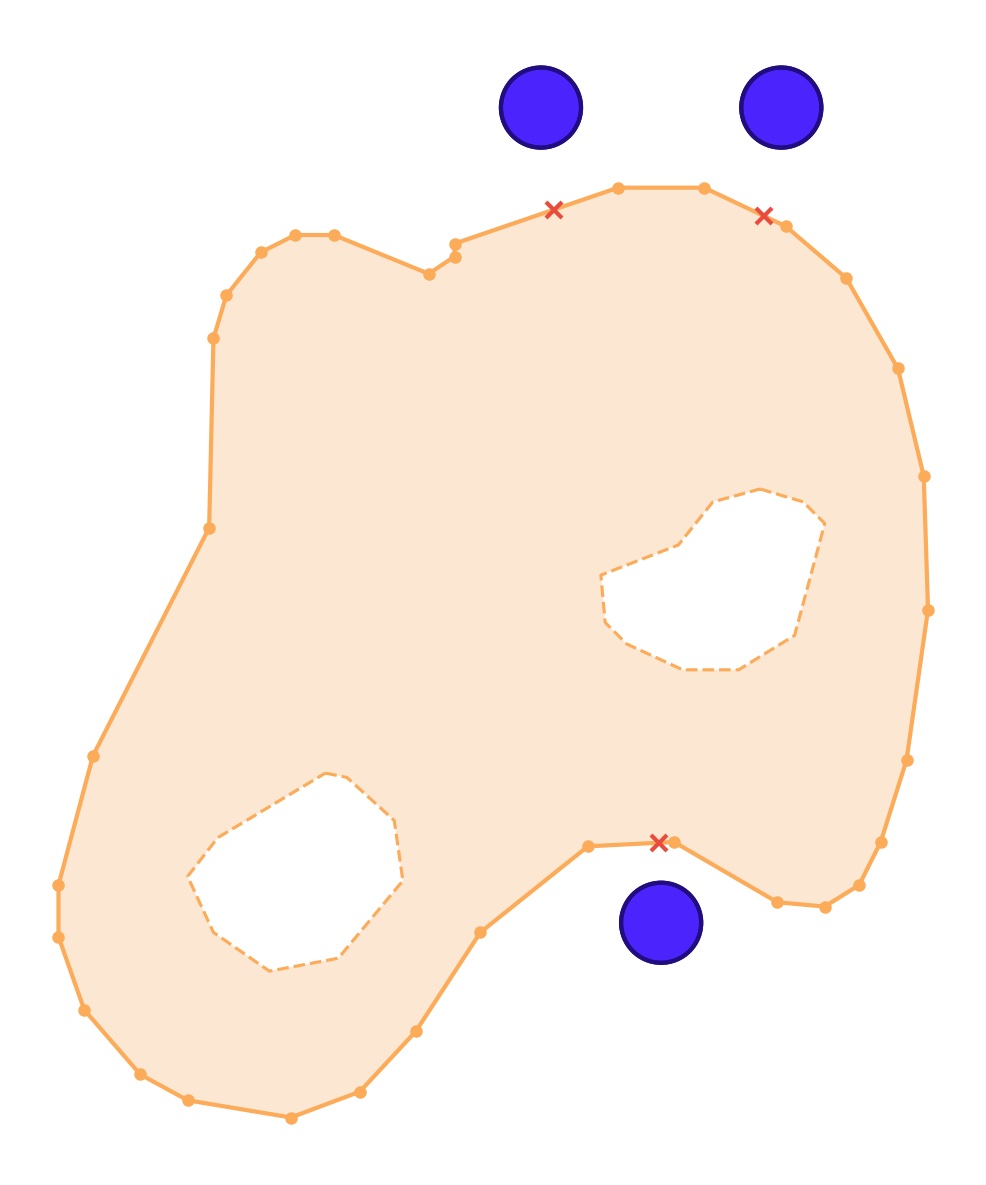
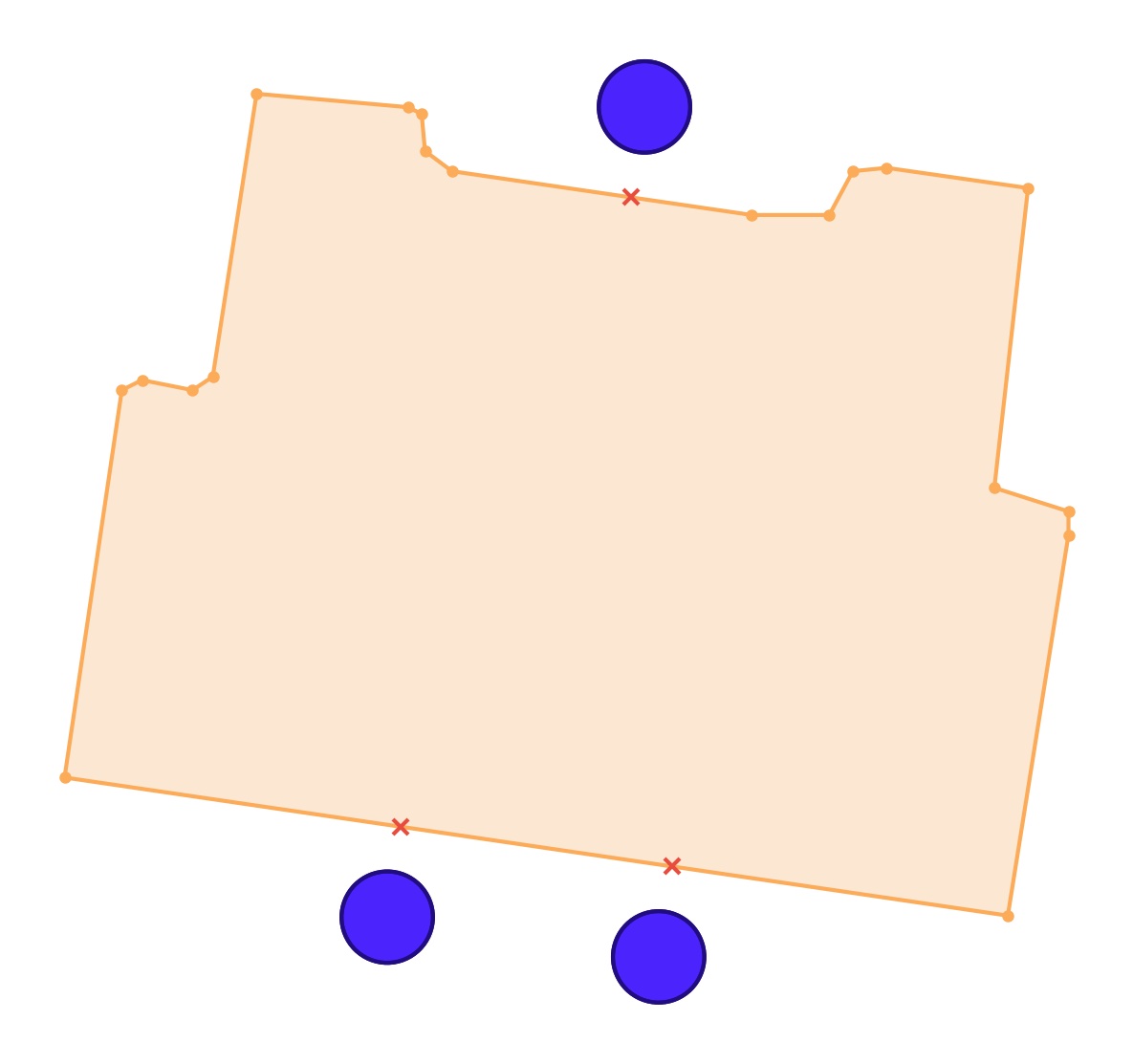
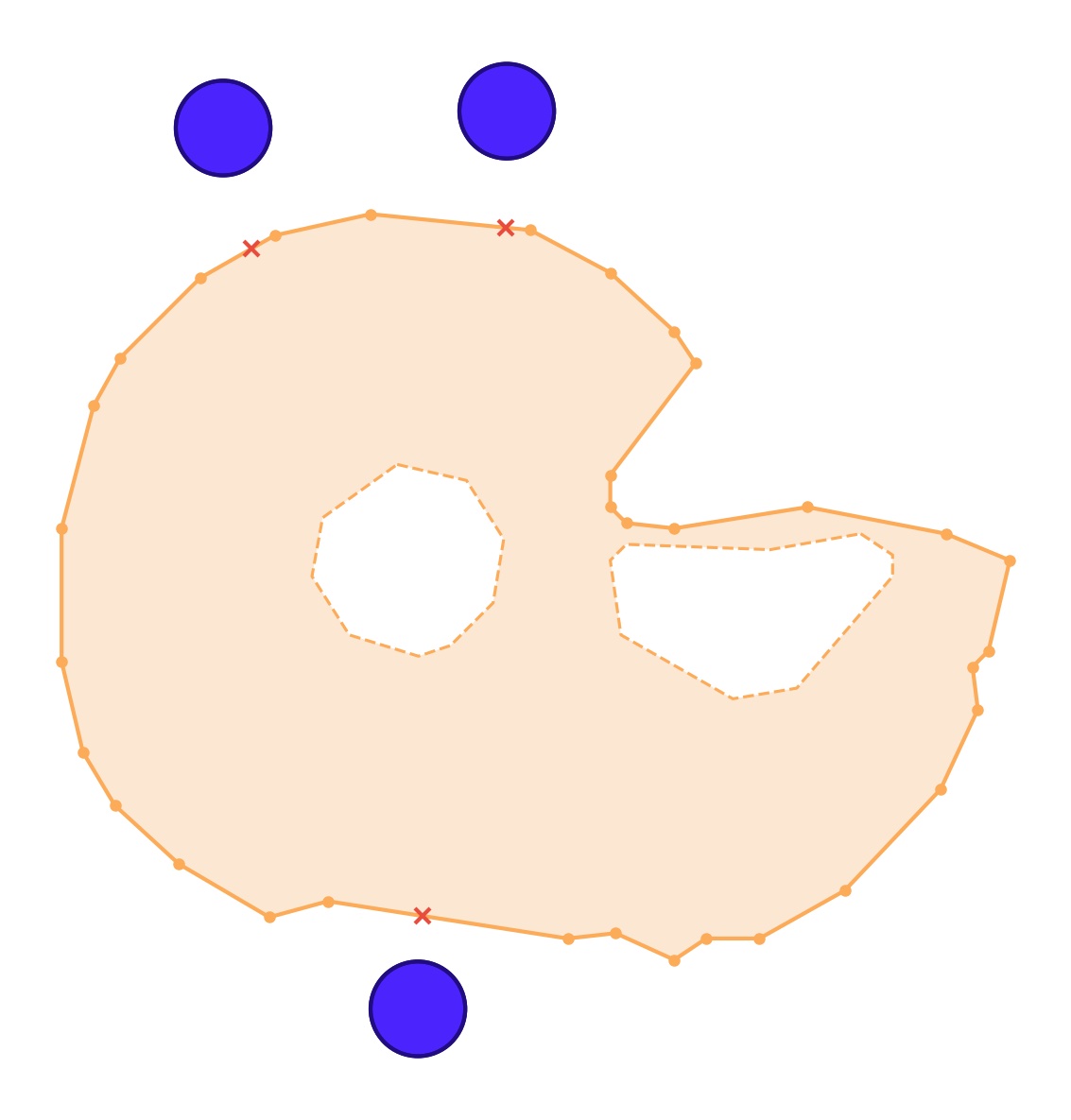
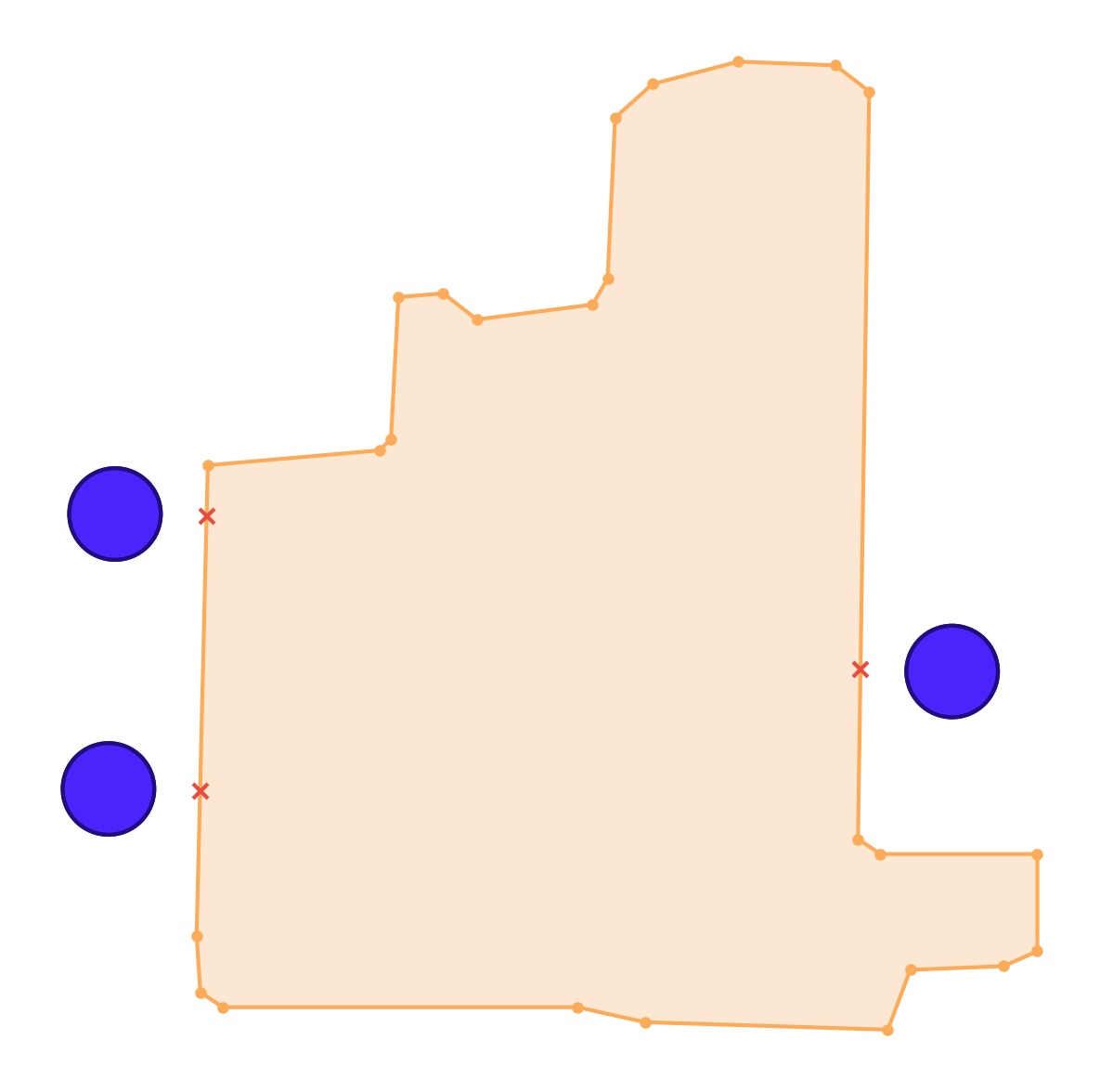
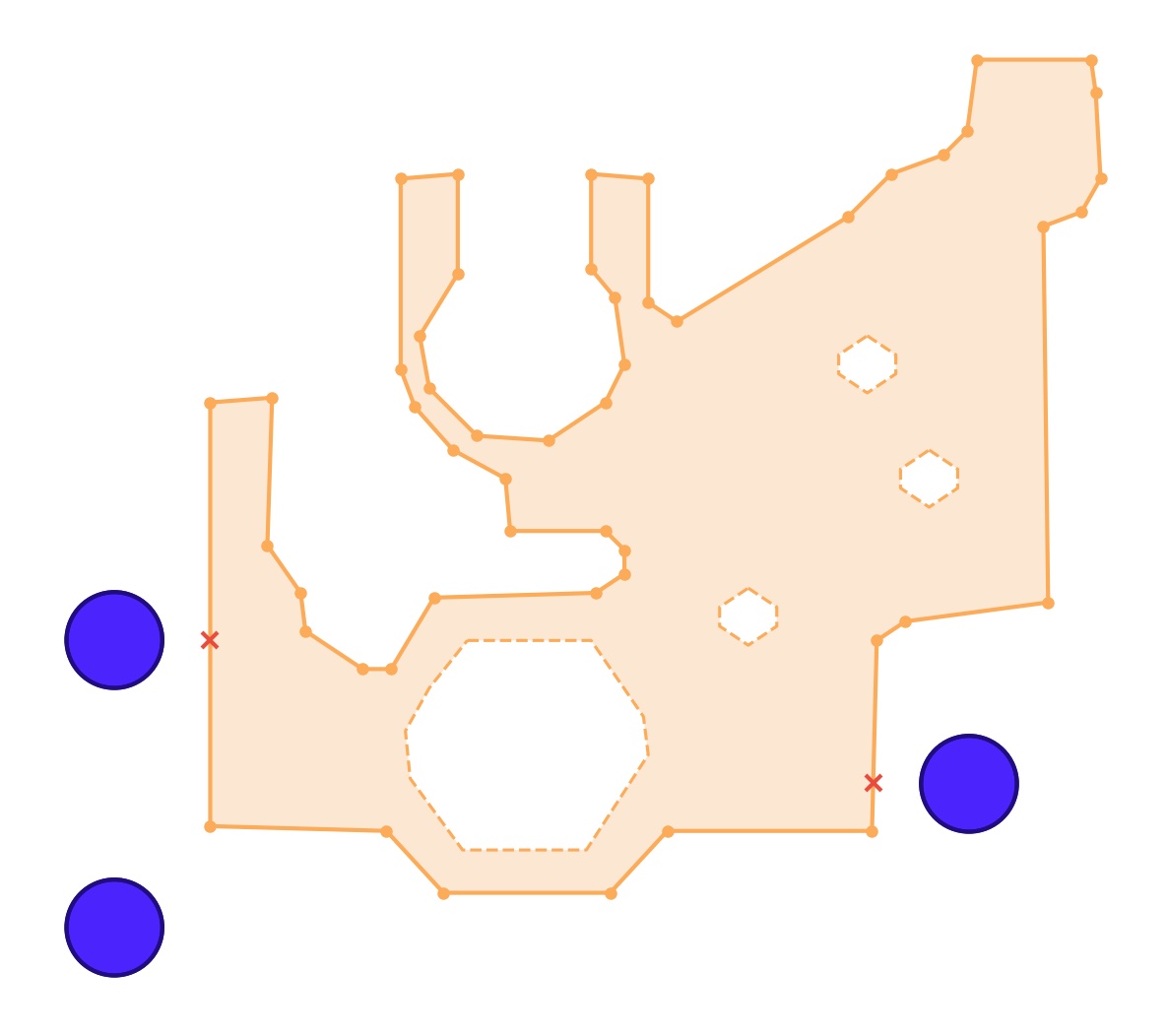
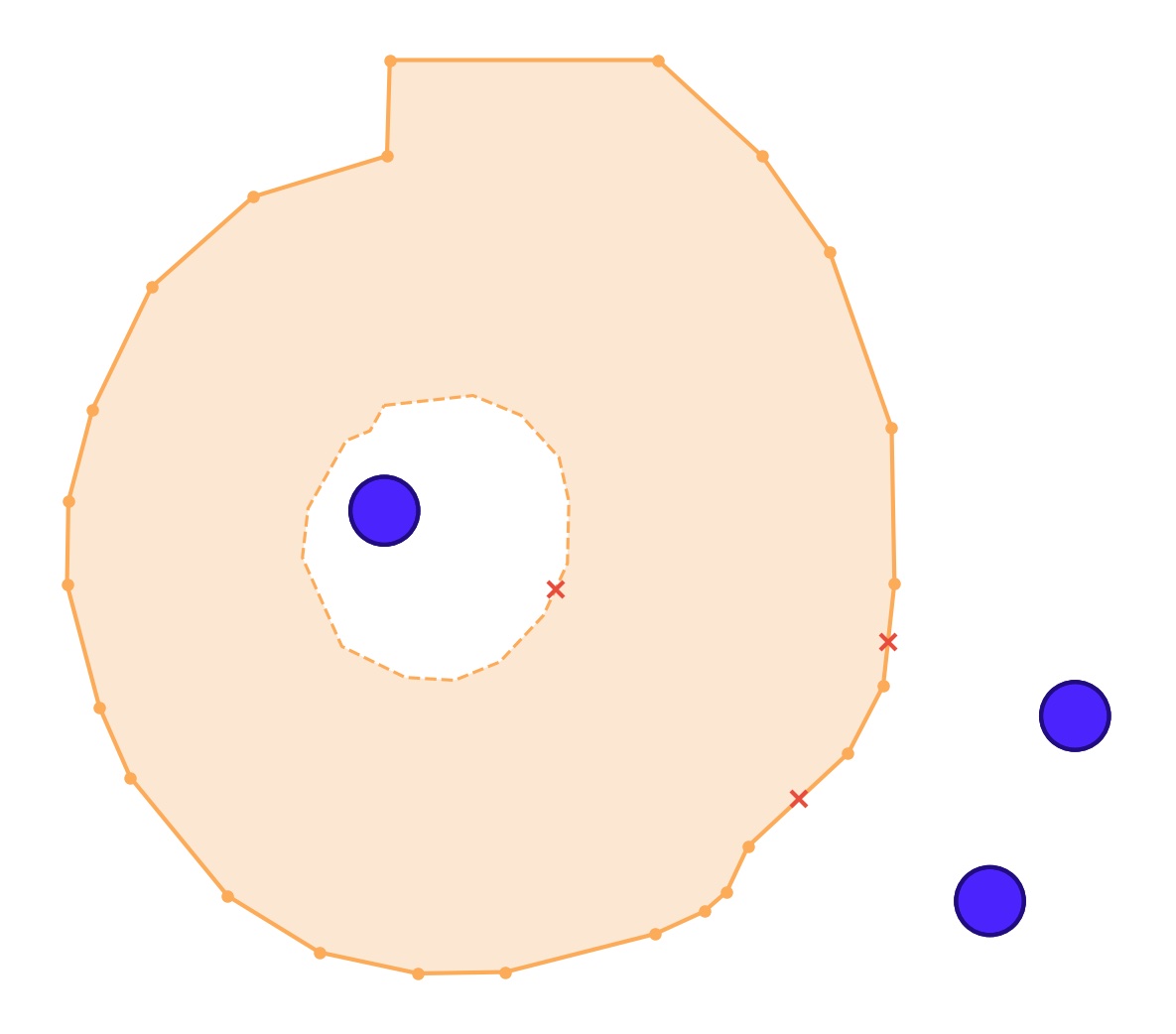
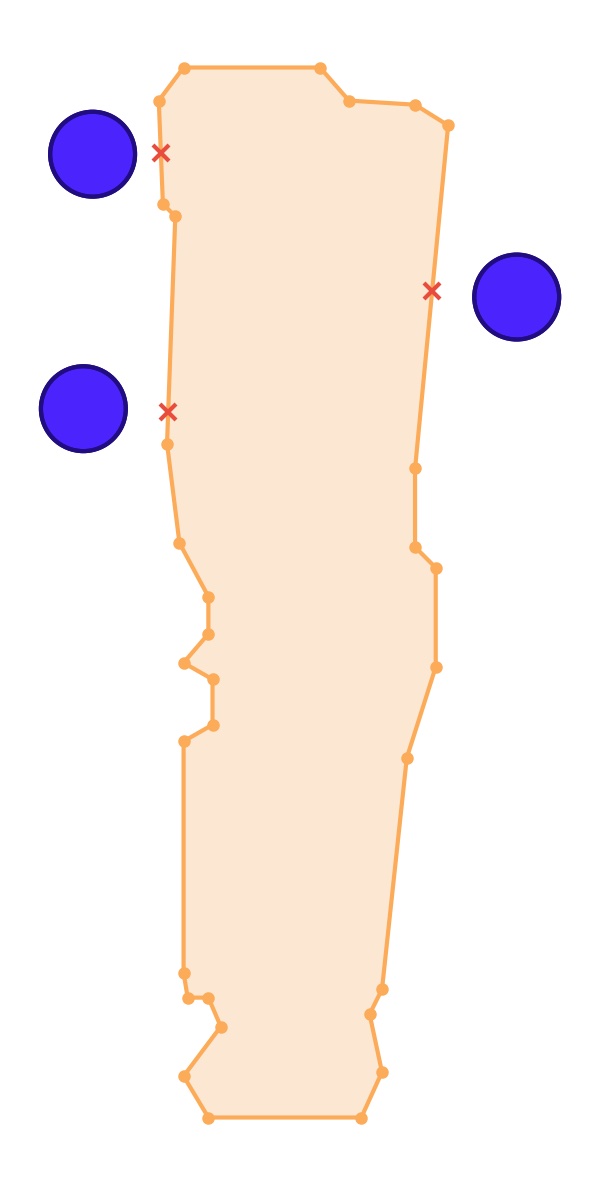
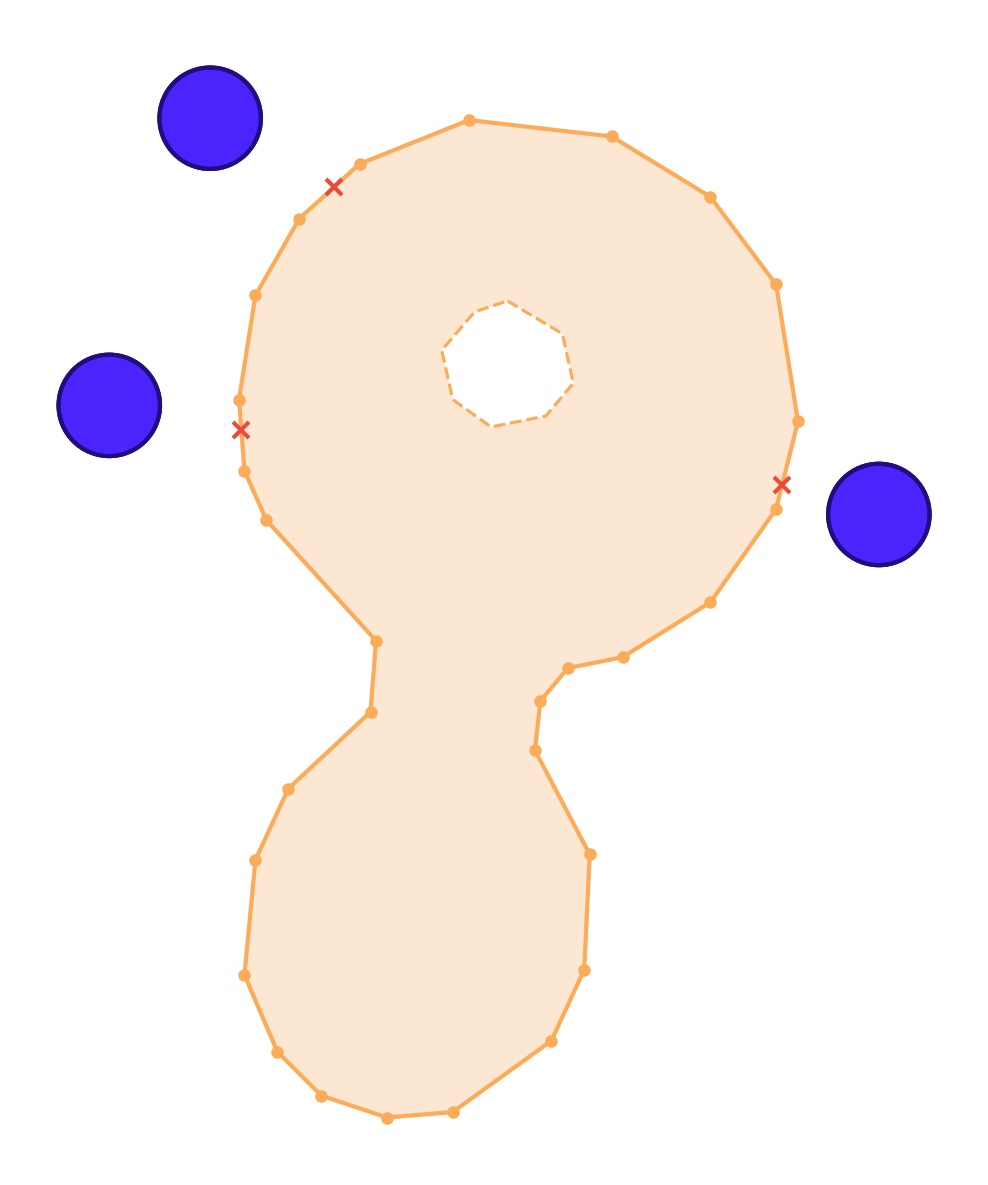
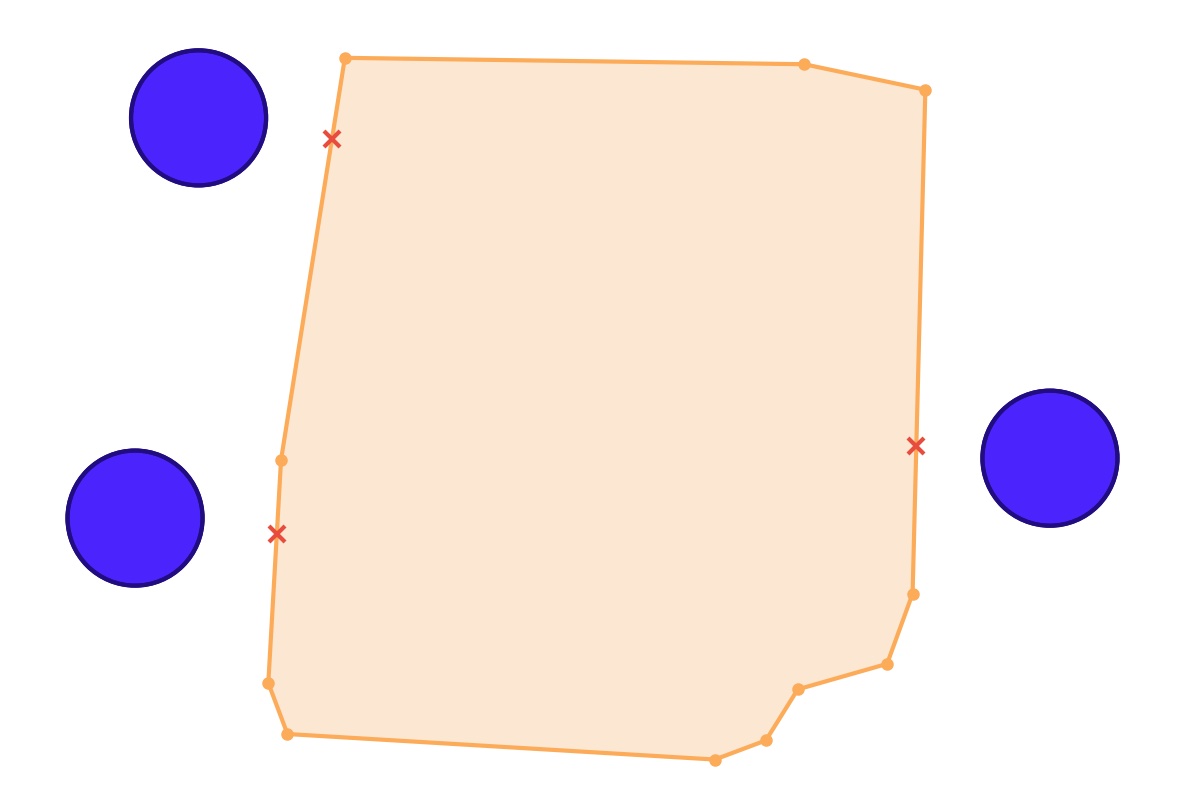
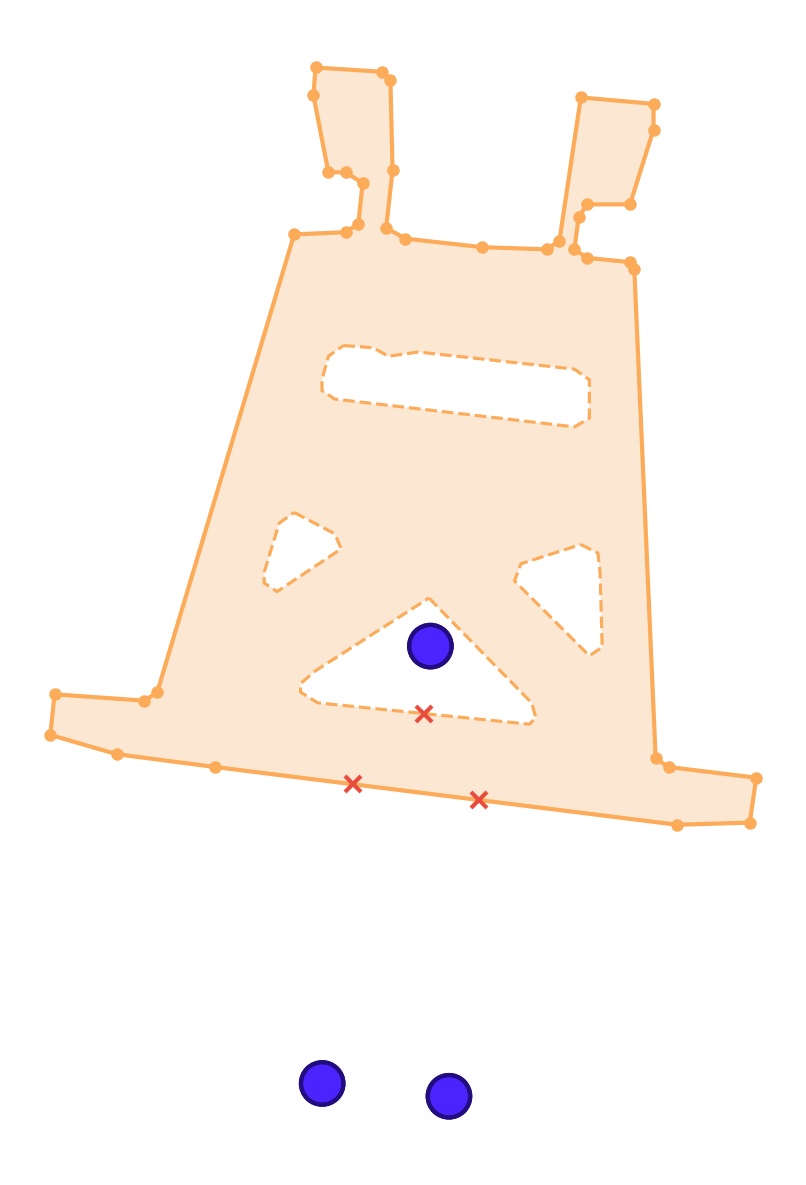
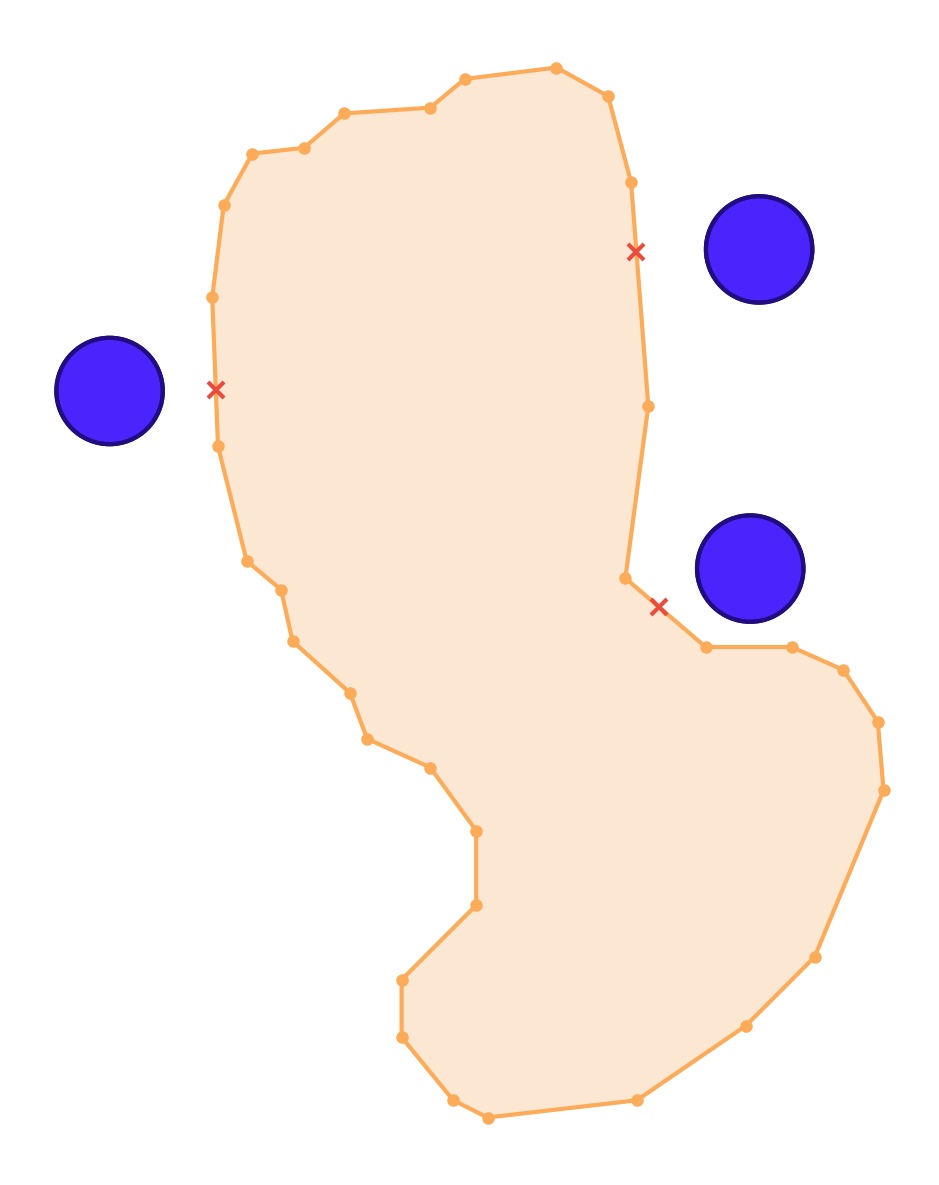
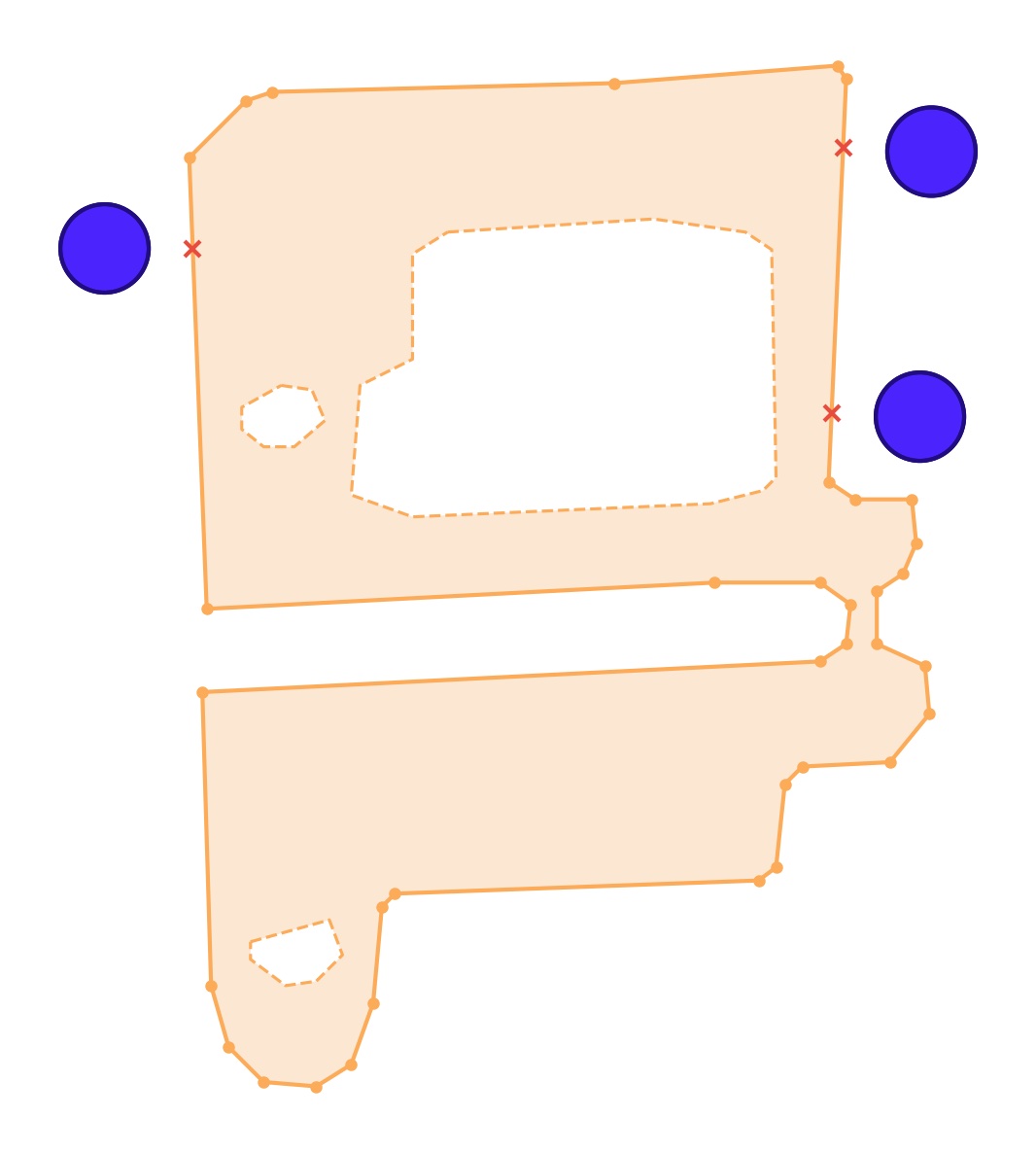
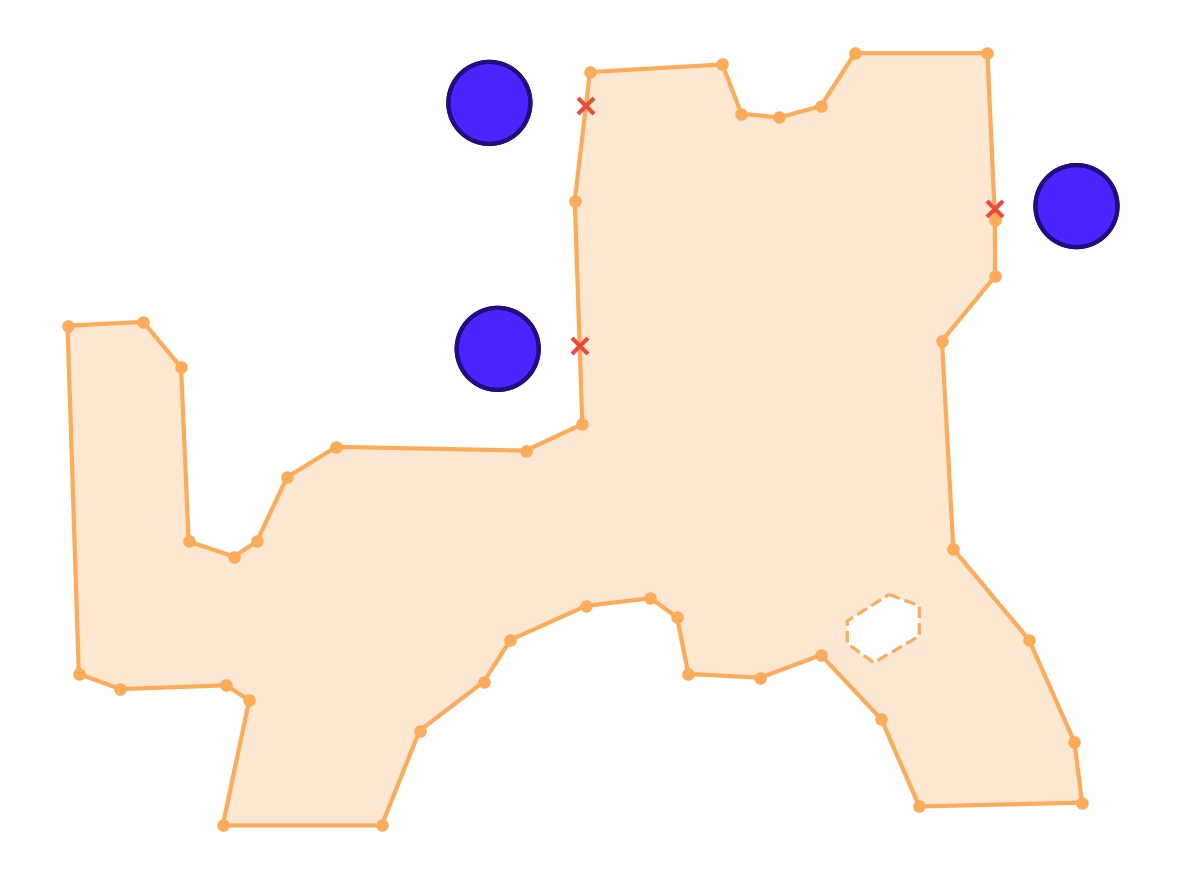
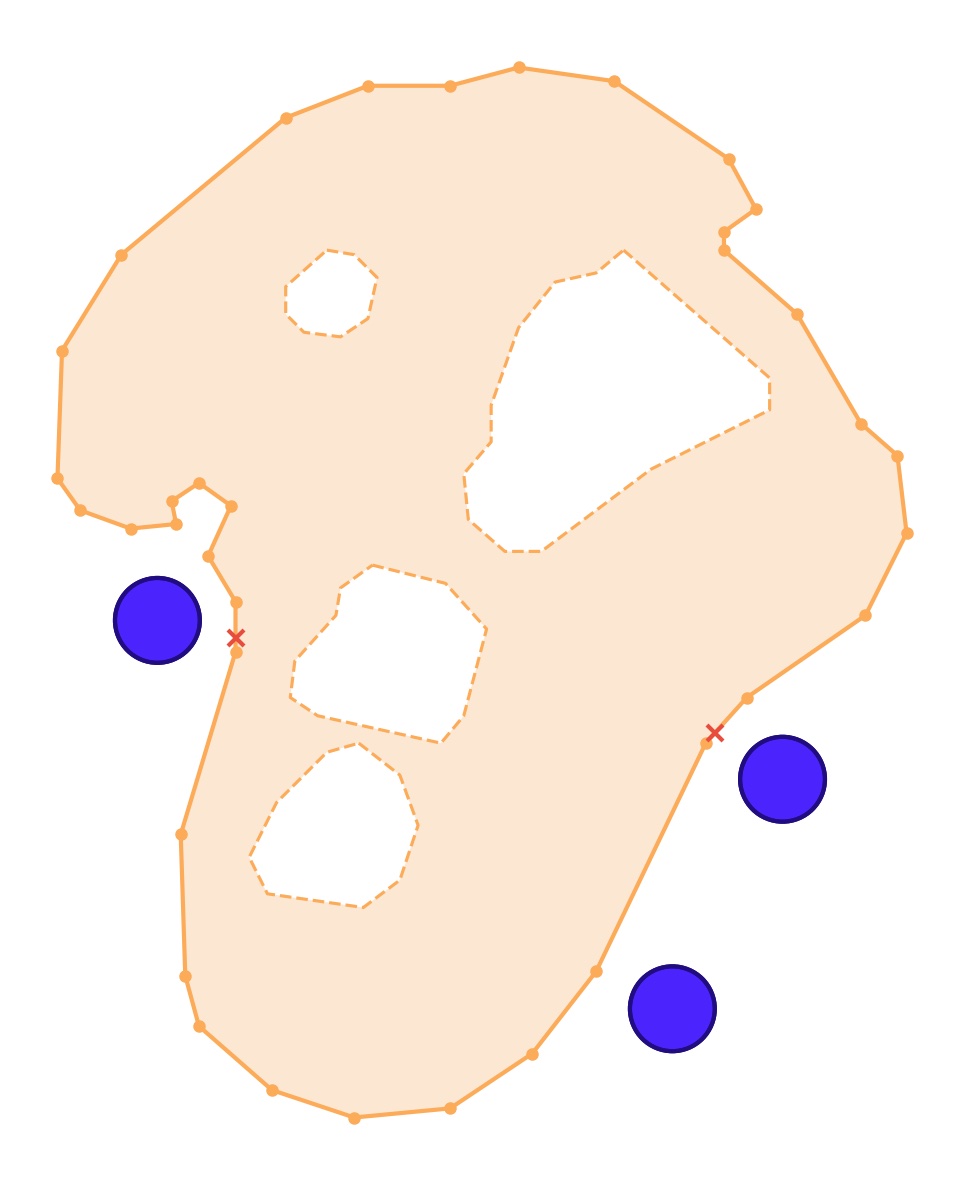
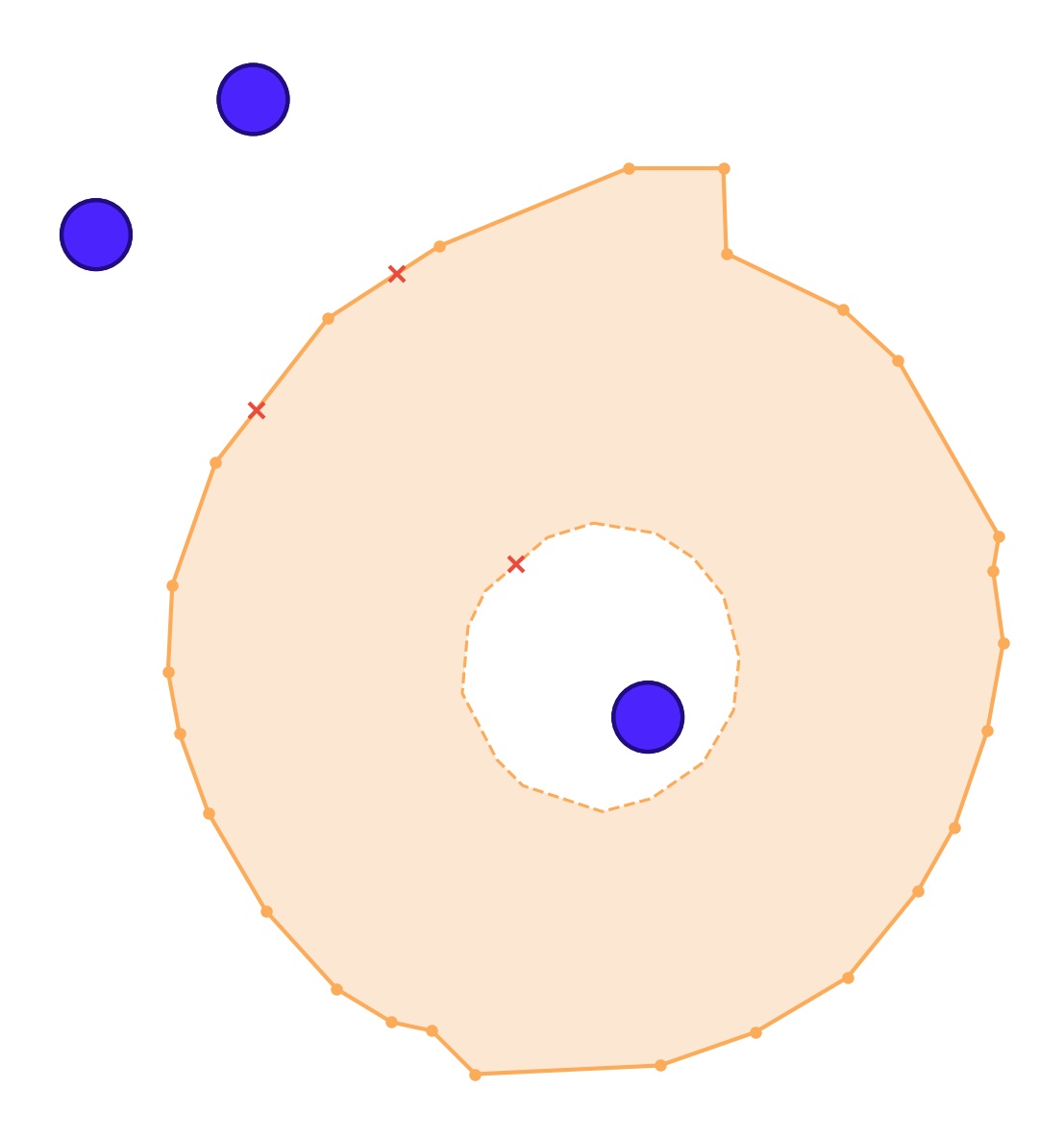
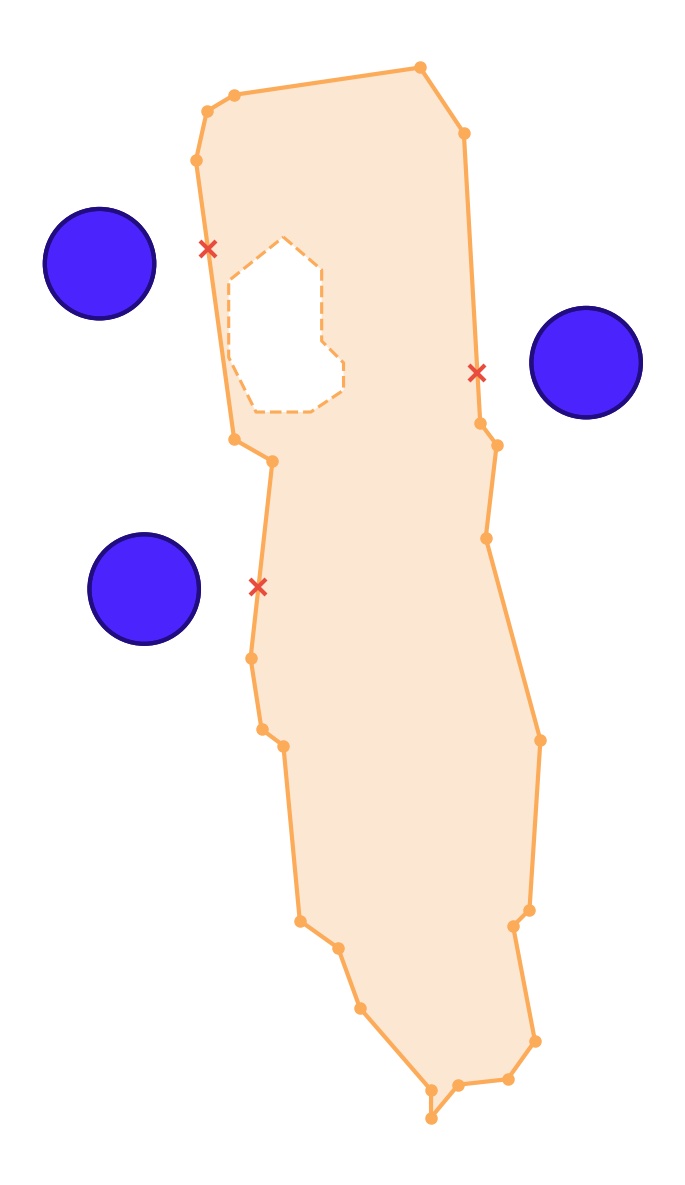
GET-2D-1.0 is a fast grasp planner requiring a single top-down RGB-D view of the workspace. It operates on a 2D footprint of the object and samples grasps perpendicular to each edge, bisecting each vertex, and with the narrow jaw placed in polygon holes. Operating on 2D geometry allows for fast grasp sampling with the planner running in an average of 683ms.
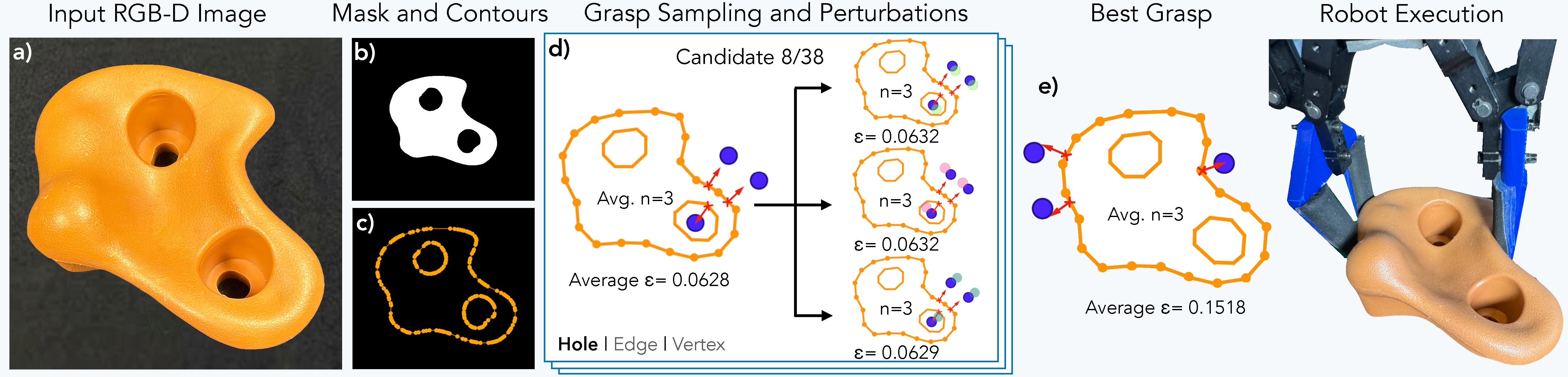
(a) The 2D grasp planner captures an RGB-D image and obtains an object mask which (b/c) is converted to a 2D polygon. (d) The planner generates candidate grasps and evaluates their force closure, number of contacts (n), and Ferrari-Canny metric (ε) across 10 positional perturbations and averages their results. (e) The grasp scored highest by the metrics is selected for execution.
Example Grasps
Scroll to see more →
FC = force closure rate · ε = average Ferrari-Canny metric over positional perturbations
GET-3D-1.0
GET-3D-1.0 plans grasps directly on 3D meshes. It casts rays from the gripper contact surfaces and uses the nearest ray-mesh intersections as the contact points (shown below as red spheres) for computing the force closure and Ferrari-Canny metrics.
Click and drag inside each viewer to rotate the 3D view. Scroll to see more.
Physical Grasp Experiments
| Method | Lift | Shake | Slip Force (N) |
|---|---|---|---|
| 2D BBox (Two Narrow) | 70% | 55% | 1.20 |
| 2D BBox (Two Wide) | 50% | 40% | 1.46 |
| 2D BBox (GET) | 65% | 60% | 2.50 |
| GET-2D-1.0 | 95% | 90% | 3.95 |
| Improvement over 2D BBox | +46% | +50% | +58% |
| GET-3D-1.0 | 100% | 95% | 3.20 |
| Improvement over GET-2D-1.0 | +5% | +6% | −19% |
We evaluate GET-2D-1.0, GET-3D-1.0, and a bounding box (BBox) baseline. The bounding box baseline executes grasps centered and normal to the longest edge of an oriented bounding box fit to the 2D object mask. The GET gripper resists over 70% more force on average than a gripper configuration with two narrow or two wide jaws. GET-2D-1.0 planning improves upon this achieving more than 45% improvement on all three metrics. GET-3D-1.0 improves in lift success and shake success, but has a lower average slip resistance and requires a mesh known in advance.
Robot Shake Test & Force Probe

Shake test and force probe used to evaluate grasp robustness. Hojila force probe (Amazon).